")
")















Para la fabricación de nuestros robots se puede utilizar cualquier tipo de alimentación, ya sean pilas alcalinas o baterías recargables en cualquiera de sus modalidades. Lo que hay que tener en cuenta son los principales parámetros de cada tipo de batería, ya que todas ellas tienen diferentes características. De esta manera podremos elegir la batería que mejor se adapta a nuestra aplicación.

Diferentes baterías en el mercado
Parámetros de las baterías
Tensión nominal
El primer parámetro a tener en cuenta es el voltaje de alimentación:
- Pilas alcalinas y demás: 1.5V nominales por elemento.
- Baterías de níquel cadmio (Ni-Cd): 1.2V. Descarga 1.1V y carga 1.4V nominales por elemento.
- Baterías níquel metal hidruro (Ni-MH): 1.2V. Descarga 1.1V y carga 1.4V nominales por elemento.
- Baterías de polímeros de litio (Li-Po): 3.7V. Descarga 3.2V y carga 4.2V nominales por elemento.
- Baterías de Litio Hierro (LiFe-Po): 3.2V. Descarga 3V y carga 3.6V nominales por elemento.
Nuestros robots, tanto el basado en Pingüino como el basado en Baby Orangutan, utilizan una alimentación de 5V para la electrónica, mientras que los motores los podemos alimentar a una tensión algo mayor (los motores de Pololu se alimentan a 6V, aunque aguantan algo más). Por otra parte, los 5V de la electrónica los sacaremos de la salida de un regulador de tensión, que necesita a su entrada una tensión algo mayor. Con esta información podemos saber el número de elementos que necesitaremos para nuestra batería. Por ejemplo, si elegimos una batería Li-Po, necesitaremos una de dos elementos, que proporcionará 7.4V.
Capacidad de la batería
La capacidad de la batería es otro parámetro importante, ya que está directamente relacionada con las horas que va a durarnos la batería antes de que la tengamos que volver a cargar. Aunque en realidad para nuestros robots este parámetro tampoco es muy decisivo, ya que las pruebas que tienen que realizar durarán unos pocos minutos. En cambio, donde sí es importante este parámetro es en las aplicaciones de aeromodelismo, ya que de él dependerá directamente la autonomía de vuelo de los aviones.
La capacidad de una batería se suele expresar en mAh (mili Amperio hora). Por ejemplo, una batería de 1000mAh, que es un valor muy habitual, podrá proporcionar una intensidad de 1000mA durante una hora antes de agotarse. Por supuesto, si el consumo es menor, la batería durará más tiempo. La misma batería de antes conectada a un circuito que consuma 500mA durará 2 horas, mientras que si el circuito consume 100mA durará hasta 10 horas. Por contra, si el circuito consume más, por ejemplo 2000mA, la batería durará tan sólo media hora.
Por tanto queda claro que la duración de una batería depende de dos cosas:
- La capacidad de la batería (expresada en mAh)
- El consumo del circuito que alimenta la batería
Podemos calcular la duración de una batería de una determinada capacidad, si conocemos el consumo del circuito que va a alimentar, mediante la siguiente ecuación:

Tasa de descarga
Continuamos poniendo como ejemplo la batería de 1000mAh del apartado anterior. Hemos visto que si la conectamos a un circuito que consuma 1000mA, tardará una hora es descargarse, y si el consumo es de 2000mA, tardará media hora. Con la ecuación que hemos visto antes, si el consumo es de 10A, se descargará en sólo 6 minutos, y si el consumo fuera de 100A, lo haría en menos de un minuto. Pero la pregunta que nos surge es: ¿esta ecuación se puede aplicar siempre o existe algún límite de corriente que puede entregar una batería sin sufrir daños? Y la respuesta es que sí, por supuesto que existe un límite, que viene expresado por un parámetro que se llama C.
Una batería de 1000mAh y 1C será capaz de proporcionar una intesidad máxima de 1000mA. En cambio, si la batería es 2C, será capaz de proporcionar el doble de intensidad, hasta 2000mA. Por supuesto, cuando esto ocurra, la batería no tardará una hora en descargarse, sino media hora. Si la batería es de 5C, será capaz de entregar hasta 5000mA, es decir, 5A, aunque si esto sucediera duraría tan sólo 12 minutos.
No todos los tipos de baterías admiten valores altos de C. Por ejemplo, las batería de níquel cadmio únicamente admiten valores de 1C. Sin embargo, existen baterías de polímeros de litio con valores muy altos de C, como 10C, 20C o hasta 50C.
Peso
El último parámetro (aunque no menos importante) es el peso, concretamente la relación entre tamaño, peso e intensidad proporcionada en Amperios/hora. Esto es fundamental para nuestros robots, puesto que como vimos en la entrada anterior, para poder utilizar micromotores con poca reductora necesitamos que el robot sea muy ligero. En este aspecto destacan sobre las demás las baterías Li-Po (polímeros de litio), que son realmente pequeñas y ligeras comparadas con las demás tecnologías.
Tipos de baterías 
Ahora que ya conocemos los parámetros más importantes de las baterías, vamos a analizar los pros y los contras de cada tipo de alimentación:
- Pilas alcalinas: Hay que desecharlas tras su utilización. Se utilizan en dispositivos de bajo consumo. Obligan a usar porta pilas al no poder ser soldadas sin dañarlas.
- Baterías níquel cadmio (Ni-Cd): Tienen efecto memoria, es decir, si se descargan parcialmente cada vez que se utilizan y luego se cargan, llega un momento en que no admiten la carga máxima. Este efecto es relativamente rápido. Se destruyen fácilmente con largos almacenamientos, tienen una auto descarga del 10% en las primeras 24 horas, y después sobre un 2,5% al día, disminuyendo con el tiempo. Se pueden unir elementos entre sí mediante soldadura. Se prohibió su uso en 2008 por su poder contaminante.

Batería Ni-Cd de 6 elementos (7.2V) y 400mAh
- Baterías metal hidruro (Ni-MH): Mucho menos efecto memoria que las de Ni-Cd, que se soluciona mediante dos o tres ciclos de descarga y carga si la batería es nueva y su tensión no ha bajado de 0,9 V. (descarga profunda). Auto descarga del 15% al 20% mensual, mayor que las de Ni-Cd. Las baterías Ni-MH doblan el tiempo de uso a las Ni-Cd con los mismos tamaños. Más sensibles que las Ni-Cd al calor. Altas corriente de carga y descarga.

Batería Ni-MH de 3 elementos (3.6V) y 800mAh
- Baterías Li-Po: No tienen efecto memoria. Pesan del 20% al 35% menos que las de Ni-MH o de Ni-Cd. No tienen efecto auto descarga. El almacenamiento puede ser prolongado siempre que se mantengan a una tensión del 75% de la nominal. Se estropean si bajan de 3 V. Altas corrientes de carga (2 .. 5 C) y descarga (20 .. 50C). Tienen la mala costumbre de explotar si se les exige por encima de sus posibilidades.

Batería Li-Po de 1 elemento (3.7V), 150mAh y 20C

En esta entrada vamos a hablar de los elementos encargados de mover nuestro robot: los motores y las ruedas.
Motores
En principio uno podría pensar que la elección de los motores es muy sencilla: se utiliza un motor de corriente continua y ya está. Pero eso no es así. Los motores de continua tienen dos grandes inconvenientes: giran demasiado rápido y, sobre todo, tienen muy poca fuerza. Por tanto, lo que debemos hacer es bajar la velocidad de un motor de continua y aumentarle la fuerza. Eso se consigue añadiéndole al motor una reductora, que no es más que un conjunto de engranajes. Y ahora viene la pregunta: ¿dónde puedo conseguir un motor de continua con reductora? Pues bien, tenemos dos posibilidades: podemos utilizar un servomotor trucado o bien adquirir un motor con reductora específico para robótica. Veamos los dos casos.
Servomotor trucado
Un servomotor es un tipo de motor especial que permite controlar la posición en la que se ubica y mantenerse estable en dicha posición. Se utiliza frecuentemente en robótica y aeromodelismo. Generalmente este tipo de motores tiene un ángulo de giro limitado, que suele ser de 180º.
Internamente un servomotor está formado por los siguiente elementos:
- Un motor de continua
- Una circuitería electrónica junto con un potenciómetro
- Un conjunto de engranajes (reductora)

Como hemos explicado antes, el conjunto de engranajes se utiliza para reducir la velocidad y al mismo tiempo aumentar el par del motor de continua. Por otro lado, el potenciómetro se utiliza para conocer la posición del servomotor, y la circuitería electrónica sirve para poder controlar dicha posición aplicando una serie de pulsos.
A nosotros no nos interesa la electrónica del servomotor, ya que el control del motor lo vamos a hacer desde nuestro microcontrolador. Por tanto, para trucar el servomotor tenemos que hacer dos cosas: eliminar la limitación de girar solamente 180º y eliminar toda la electrónica del interior. De esta forma, habremos transformado un servomotor en un motor de continua con reductora. Existen varias páginas web que explican cómo hacer este trucaje. Una de ellas la tenéis en el siguiente enlace:
Algunos de los modelos de servomotores más utilizados para estas aplicaciones son el Futaba S3003 y el Hitec HS-311 (o alguno similar a estos dos). Aunque son opciones válidas, todos ellos presentan el mismo inconveniente: tienen una reductora grande, lo que les proporciona bastante fuerza pero poca velocidad. Esto se convierte en un inconveniente bastante importante si queremos fabricar robots para participar en una competición de velocidad, como es nuestro caso. Por eso, para construir robots velocistas o rastreadores recomendamos utilizar micromotores de continua con reductora, en vez de servomotores trucados.
|
Servomotor Futaba S3003 |
Servomotor Hitec HS-311 |


Micromotor de continua con reductora
La segunda posibilidad, y la más recomendable, es adquirir un micromotor de continua con reductora especialmente diseñado para robótica. La empresa Pololu, fabricante del famoso robot 3Pi y del controlador Orangután, fabrica también todo tipo de accesorios para robótica, incluyendo motores y ruedas.

Conjunto de micromotores para robótica de la empresa Pololu
Para construir un robot velocista nos interesan los motores más pequeños, llamados Micro Metal Gearmotors. Son motores muy pequeños y ligeros, pero que pueden llegar a ser muy rápidos. Por tanto son perfectos para construir nuestros robots, que podrán competir en un concurso de velocidad.

Micro Metal Gearmotor de Pololu
Dentro de los Micro Metal Gearmotors existen diferentes modelos con diferente valor de reductora. Es muy importante que elijamos correctamente el valor de reductora, puesto que una reductora demasiado grande haría que nuestro robot se moviera más despacio, pero una reductora demasiado pequeña haría que el motor no tuviera fuerza suficiente para mover el robot. Por tanto, como es lógico, la reductora a elegir dependerá del peso de nuestro robot. Las diferentes reductoras que ofrece el fabricante son: 5:1, 10:1, 30:1, 50:1, 75:1, 100:1, 150:1, 210:1, 250:1, 298:1 y 1000:1. A continuación os mostramos una tabla comparativa con las principales características de algunos de ellos:
Para poder competir en condiciones en un concurso de velocidad, lo ideal sería utilizar los micromotores con reductora 10:1 HP, pero para eso nuestro robot debe pesar como máximo unos 125 gramos. Si nuestro robot pesa más, tendremos que utilizar motores 30:1 HP o 50:1 HP.
En nuestro caso, para los robots que vamos a construir con el controlador Baby Orangutan utilizaremos los motores 10:1 HP. Sin embargo, para los robots que fabricaremos basándonos en Pingubot, utilizaremos los motores 30:1 HP, ya que estos robots serán algo más pesados, debido a que la electrónica no es tan compacta, puesto que es de fabricación casera.
Hay que tener especial cuidado con el consumo que los motores HP (high power) presentan en paro, ya que es de 1600mA. Teniendo en cuenta que nuestro robot lleva dos motores, si por cualquier motivo el robot se saliera de la pista y chocara contra una pared y no pudiera avanzar, el consumo del los motores podría llegar a los 3.2A.
Una ventaja de este tipo de motores es que disponen de varios accesorios, como un soporte para engancharlos al chasis, o un encoder que se acopla perfectamente con el motor y la rueda.
|
Conjunto motor + encoder + rueda |
Micromotor con soporte para chásis |


Ruedas
Las ruedas son otro elemento muy importante de nuestros robots, por lo que la elección la debemos hacer con cuidado. Podemos tener unos motores muy potentes, pero si las ruedas no son las adecuadas, el robot no se moverá como queremos.
La primera pregunta que nos hacemos es: ¿de qué tamaño deben ser las ruedas? Como suele pasar en estos casos, no existe una solución perfecta. Una rueda de diámetro grande proporcionará al robot mayor velocidad, ya que por cada vuelta de la rueda el robot avanzará mucha distancia. Pero al mismo tiempo levantará mucho al robot del suelo, por lo que el centro de gravedad quedará más alto, haciéndolo más inestable al tomar las curvas. Por contra, una rueda con diámetro menor proporcionará menos velocidad, pero el robot irá más cerca del suelo, y por lo tanto será más estable.
Por tanto, el tamaño de la rueda está muy relacionado con la elección del motor. Si vas a utilizar servomotores trucados, que son más lentos, lo recomendable sería una rueda grande (6-8 cm de diámetro). En caso de usar un micromotor como el 10:1 HP, que tiene velocidad de sobra para nuestro propósito, lo recomendable es utilizar una rueda más pequeña (3-4cm de diámetro), que proporcionará mayor estabilidad.
Otro aspecto a tener en cuenta es el diámetro del agujero para el eje, que debe ser del mismo tamaño que el eje del motor. Los micro metal gearmotors tienen un eje de 3mm de diámetro, por lo que tendremos que buscar ruedas con el mismo tamaño de eje.
En nuestro taller vamos a probar con varias ruedas diferentes, para ver cuál de ellas proporciona mejores resultados. Las ruedas que hemos elegido son las siguientes:
Rueda Pololu de 42x19mm
Está diseñada por la empresa Pololu, y por tanto encaja muy bien en el eje de los micromotores. Es un poco grande y pesada, pero tiene la ventaja de que la llanta tiene una serie de muescas preparadas para acoplarles un encoder del mismo fabricante. Esto es muy útil para programar un algoritmo que permita al robot aprenderse el camino, para poder acelerar o reducir según el trazado.

Rueda Pololu de 32x7mm
Esta rueda también es de la empresa Pololu, por lo que encaja perfectamente en el eje de los micromotores. Su principal ventaja es que tiene un diámetro menor, lo que dará más estabilidad al robot al tomar las curvas. Por contra presenta dos inconvenientes: es un poco estrecha (tan sólo 7mm de anchura), lo que le proporciona menor agarre, y no dispone de las muescas para poder acoplarle un encoder.

Rueda RW2 de 32x11mm
Esta rueda se puede adquirir en tiendas online como Juguetronica o Solarbotics. No es del fabricante Pololu, por lo que no encaja a la perfección con el eje de los micromotores, pero se puede usar sin problemas. Tiene un tamaño ideal, pues tiene un diámetro bastante pequeño pero es suficientemente ancha. Además, es una rueda totalmente lisa, lo que le proporciona mayor agarre. El único inconveniente es que no dispone de las muescas para acoplarle un encoder.

Hasta aquí todo lo que os teníamos que contar acerca de los motores y las ruedas. En la próxima entrada hablaremos del elemento encargado de proporcionar la energía a nuestro robot: la batería. ¡Hasta luego!
Diseñar el chasis de un robot no es una cuestión trivial. Hay muchos factores que se deben tener en cuenta: la forma, el tamaño, el peso, el material de fabricación, la distribución del peso, la separación de las ruedas, la altura del chasis con respecto al suelo, etc. Todos estos factores van a influir en el movimiento del robot, en la manera en que toma las curvas y sale de ellas. Para saber de forma exacta cómo influyen todos estos parámetros, necesitaríamos hacer una análisis mecánico muy complejo, por lo que en principio vamos a fabricar nuestro chasis basándos en tres reglas básicas:
1.- Hacer el chasis lo más ligero posible. El motivo es que vamos a utilizar unos motores muy rápidos pero que tienen muy poca fuerza, por lo que no serían capaces de mover un chasis pesado. Ojo, cuando hablamos de ligero, nos referimos a que nuestro robot puede pesar como máximo 120 gramos!! Por eso es muy importante elegir correctamente el material de fabricación.
2.- Alejar los sensores del eje de tracción del robot. Esto permitirá al robot "ver" con antelación cómo es el circuito, detectar las curvas antes de que llegue a ellas, anticiparse a las curvas.
3.- Conseguir que el centro de gravedad del robot se sitúe en el eje de los motores. De esta forma tendremos la máxima tracción y estabilidad en las curvas, lo que nos permitirá aumentar la velocidad del robot.
Una vez que conocemos los principales criterios, veremos qué forma le damos al chasis, y qué material utilizamos para fabricarlo:
Forma del chásis
Si echamos una ojeada en Internet a otros robots velocistas, veremos que la mayoría de ellos tienen más o menos la misma forma:
|
Robot Veloli, campeón de Cosmobot 2011 |
Robot Zero, diseñado por un miembro del C.I.r.E. |


Como se puede observar, todos los robots velocistas tienen una forma parecida: en la parte trasera, donde está la tracción del robot, se sitúa la electrónica y la batería, mientras que los sensores que detectan la línea negra se encuentran en la parte delantera, unida al cuerpo del robot mediante un largo brazo. Esto se hace así para que haya una cierta distancia entre los sensores y los motores, de forma que el robot "vea" antes las curvas del circuito y se pueda anticipar a ellas.
Ya hemos visto que nuestro robot debe tener un brazo, pero ¿cuál es la longitud adecuada del brazo? Eso depende... cuanto más largo sea el brazo, mayor será la separación entre sensores y motores, por lo que podrá anticiparse mejor a las curvas. Pero si la curva es muy cerrada, un brazo demasiado largo puede hacer que no tome la curva correctamente. Por tanto, el tamaño del brazo dependerá del tipo de circuito que tenga que recorrer nuestro robot. Cuanto más cerradas sean las curvas, más corto debería ser el brazo. Imagina la dificultad que tiene un camión largo para tomar una curva muy cerrada. Por ejemplo, en el concurso Desafío Robot que se celebra en Valencia las curvas tienen un radio mínimo de 10 cm, que es bastante poco, por lo que el robot no debería tener un brazo demasiado largo. Debería ser algo parecido al siguiente robot, diseñado para un curso de robótica en la Campus Party Valencia 2010.

Robot uXbot, diseñado para la Campus Party Valencia 2010
En todo caso, lo más importante en cuanto al diseño del chasis es que, una vez colocados todos los componentes del robot, el centro de gravedad debe quedar sobre el eje de los motores, o un poco por delante de él. De esta forma el robot tendrá mayor estabilidad al tomar las curvas. Esto lo conseguiremos compensando el peso del brazo, que está por delante del eje de los motores, con el peso de las batería y la electrónica, que deberán sobresalir ligeramente por detrás del eje de los motores.
Por último comentar que la distancia entre las ruedas también es importante. Si la distancia entre las ruedas es pequeña, el robot será capaz de girar con rapidez, pero por contra pequeñas diferencias de velocidad en los motores provocarán que el robot no vaya recto y tenga que rectificar constantemente, perdiendo tiempo.
Una vez que tenemos más o menos clara la forma del chasis (el diseño final lo obtendremos después de probar varios prototipos), vamos a analizar qué material debemos emplear para su fabricación.
Material para fabricar el chásis
Para hacer el chasis lo más ligero posible tenemos que elegir cuidadosamente el material con el que lo fabricaremos. Tiene que ser un material resistente pero ligero, y a ser posible que sea fácil de mecanizar. Como suele ocurrir, no existe una única opción, sino una serie de posibilidades, cada una con sus ventajas e inconvenientes. A continuación analizamos 3 posibles materiales para nuestro chasis:
- PVC expandido: también llamado forex o PVC espumado, es un plástico derivado del vinilo. Se trata de un material resistente, ligero y fácil de mecanizar, ya que se puede cortar simplemente con un cutter. Se vende en láminas de diferentes tamaños y grosores. Para nuestra aplicación, un grosor de 3mm puede ser lo más adecuado.
|
Láminas de PVC expandido de diferentes colores
|
Robot EVA, realizado por un miembro del C.I.r.E con PVC expandido |


- Metacrilato: se trata de un tipo de plástico, también conocido como acrílico de vidrio. Al igual que el PVC expandido, es un plástico ligero pero resistente, aunque es más difícil de mecanizar. Se vende en planchas o láminas de diferentes tamaños y grosores, desde 2 mm hasta 120 mm. Para nuestro robot, un grosor de 2mm sería suficiente.
|
Láminas de metacrilato |
Robot Pingubot realizado por nuestros alumnos |


- PCB (Printed Circuit Board): Una opción muy interesante es que el chasis de nuestro robot sea la propia PCB o placa de circuito impreso, donde irán conectados todos los componentes electrónicos. De esta forma nos evitamos poner la placa electrónica sobre el chasis, ya que juntamos la electrónica y el chasis en una única pieza. Como ejemplo os mostramos una fotografía del robot Prometeo, campeón del Desafío Robot 2012. Como se pueda apreciar, la placa donde van los componentes hace las veces de chasis. Esta opción es sin duda la más interesante si ya tenemos claro el diseño final del chasis, pero mientras estemos trabajando con prototipos será conveniente utilizar metacrilato o PVC expandido, que permiten una manipulación mucho más sencilla.

Robot "Xé qué bot!", campeón de Desafío Robot 2013,
realizado por nuestro alumnos con chásis de PCB
Existen muchas más opciones para fabricar el chasis de nuestro robot. Se pueden usar otros materiales plásticos, como el poliestireno, o incluso madera de balsa, que también es muy ligera y se utiliza en aeromodelismo. También se puede utilizar una "placa de topos" que sirva para conectar los componentes electrónicos y a la vez funcione como chasis. Nosotros finalmente hemos decidido hacer los prototipos de nuestro chasis con PVC expandido. Cuando tengamos un diseño de chasis que obtenga buenos resultados en las pruebas, lo realizaremos en una placa de circuito impreso, que será nuestro diseño definitivo.
Pues hasta aquí todo lo que teníamos que contaros sobre el chasis del robot. En la próxima entrada hablaremos de dos elementos muy importantes en un robot velocista/rastreador: los motores y las ruedas.
¿Quieres saber cómo se construye un robot? En este tutorial encontrarás toda la información que necesitas para poder construir tu propio robot velocista. Si no sabes lo que es un robot velocista, te diremos que se trata de un robot que es capaz de recorrer con rapidez un circuito delimitado por una línea negra sobre un fondo blanco. Cuando hayas construido un robot de estas características, podrás realizar diseños más complejos haciendo pequeñas modificaciones. Así llegarás a fabricar un robot que sea capaz de salir de un laberinto, o que siga la luz, o que pueda esquivar obstáculos o incluso que se pueda manejar a través de una tableta o móvil Android.
Antes de ponernos a fabricar nuestro robot, debemos tener muy claro cuáles son las diferentes partes o elementos que lo componen. Para un robot velocista como el nuestro, podemos distinguir los siguientes elementos:
- Chasis: es la parte del robot que debe soportar los demás elementos (baterías, motores, electrónica).
- Motores: son los que van a proporcionar tracción a nuestro robot.
- Ruedas: hay que elegirlas bien, puesto que de su diámetro y anchura depende la velocidad,agarre,etc
- Alimentación: las baterías son las encargadas de dar la energía a los motores y a la electrónica.
- Electrónica: dentro de este grupo podemos distinguir el microcontrolador, que es el cerebro del motor, los sensores, que son los que permiten detectar el entorno, y los drivers de potencia, que son los circuitos encargados de suministrar la energía necesaria a los motores para hacerlos rodar.
- Programación: es la única parte del robot que no se ve. Es el software que ejecuta el microcontrolador, es decir, las órdenes que le dicen al microcontrolador lo que tiene que hacer.

La correcta elección de todas estas partes es el primer paso que tenemos que hacer a la hora de fabricar nuestro robot, ya que el buen funcionamiento del mismo dependerá de que todos los elementos sean los adecuados para nuestra aplicación. A continuación se explicarán cada una de estas partes:
|
|
|
|
|
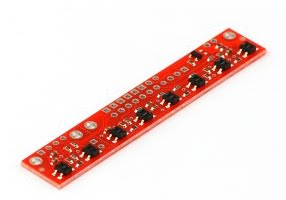
Parte 4: Sensores
|
|
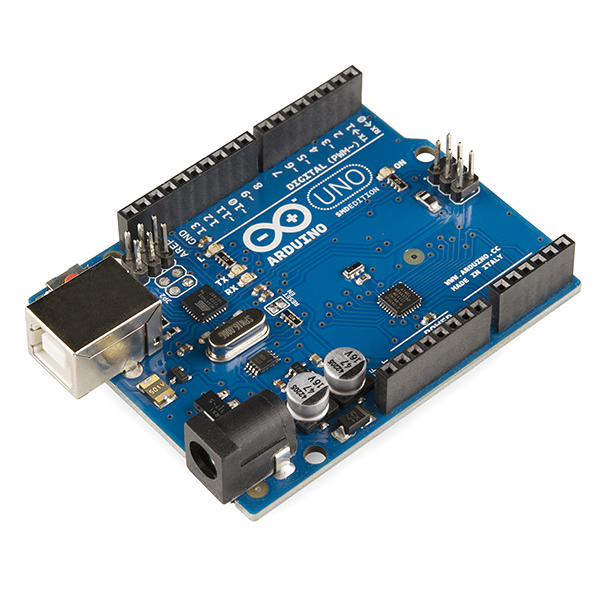
Parte 5: Controlador
|
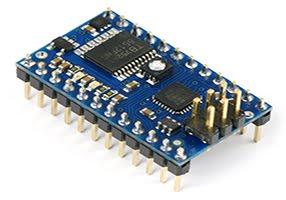
Parte 6: Control de potencia |
|
Parte 7: Programación
|
|